仿乌贼水下机器人设计与控制
The Design and Control of Squid-Like Underwater Robot
仿乌贼水下机器人设计与控制 |
| 张天栋,王睿,王硕 |
|
The Design and Control of Squid-Like Underwater Robot |
| Zhang Tiandong,Wang Rui,Wang Shuo |
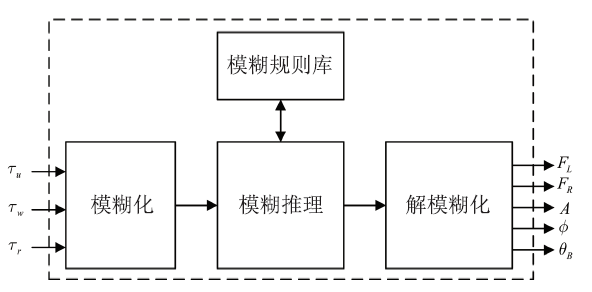
| 图3 基于模糊数学的波动推进力/力矩―行波参数映射模型结构框图 |
| Fig.3 Structure block diagram of the mapping model from propulsive force/torque to traveling wave parameter based on fuzzy mathematics |
|
|